Innan vi börjar koppla ESP32 med PIR-sensor måste vi veta hur avbrott fungerar och hur man läser och hanterar dem i ESP32. Låt oss diskutera hur PIR fungerar med ESP32 i detalj.
Här är innehållet i denna artikel:
2: Anropa ett avbrott i ESP32 – MicroPython
3: Gränssnitt PIR-sensor med ESP32 – MicroPython
3.1: PIR-rörelsesensor (HC-SR501)
1: Vad är avbrott
De flesta händelser som händer i ESP32-programmering körs sekventiellt, vilket innebär rad för rad exekvering av kod. För att hantera och kontrollera händelser som inte behöver köras under sekventiell exekvering av kod an Avbryter används.
Till exempel, om vi vill utföra en viss uppgift när någon speciell händelse inträffar, eller en triggersignal ges till digitala stift på mikrokontrollern använder vi avbrott.
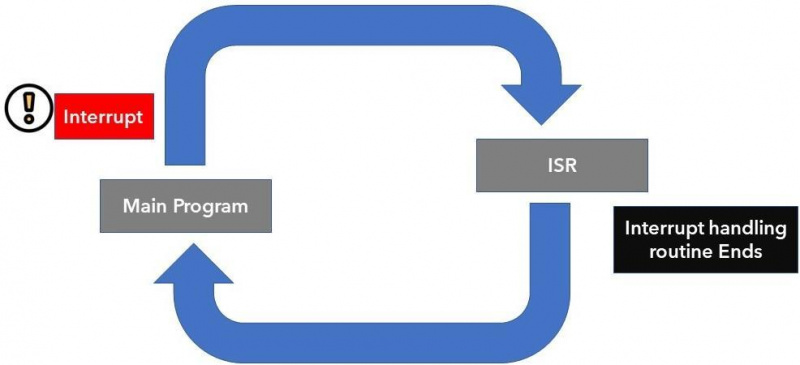
Med avbrott behöver vi inte kontinuerligt kontrollera det digitala tillståndet för ESP32-ingångsstiftet. När ett avbrott inträffar stoppar processorn huvudprogrammet och en ny funktion anropas som kallas ISR ( Rutin för avbrott i tjänsten ). Detta ISR funktionen hanterar avbrottet som orsakas efter att återgå till huvudprogrammet och börja köra det. Ett av exemplen på ISR är PIR-rörelsesensor som genererar ett avbrott när rörelse detekteras.
1.1: Avbryter stift i ESP32
Ett externt avbrott eller hårdvaruavbrott kan orsakas av vilken hårdvarumodul som helst som peksensor eller tryckknapp. Beröringsavbrott inträffar när en beröring upptäcks på ESP32-stiften eller GPIO-avbrott kan också användas när en tangent eller tryckknapp trycks ned.
I den här artikeln kommer vi att utlösa ett avbrott när rörelsen detekteras med PIR-sensorn med ESP32.
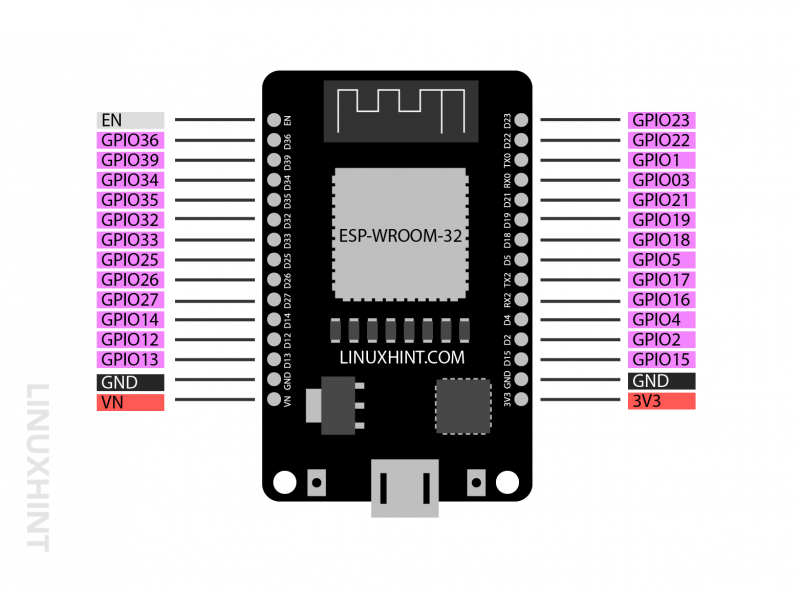
Nästan alla GPIO-stiften utom 6 SPI-integrerade stift som vanligtvis kommer i 36 stiftversionen av ESP32-kortet kan inte användas för att avbryta samtal. Så för att ta emot det externa avbrottet är följande stift man kan använda i ESP32:
2: Anropa ett avbrott i ESP32 med MicroPython
För att programmera ett ESP32-kort med PIR-sensor med hjälp av MicroPython-kod. Vi måste definiera en avbrottsfunktion. Följande är några enkla steg som hjälper till att definiera ett avbrott för ESP32-kortet.
Steg 1: Initiera avbrottshanteringsfunktionen: Avbrottshanteringsfunktionen bör definieras på ett enkelt sätt så att den kan köras snabbt och återgå till huvudprogrammet så snabbt som möjligt. Detta kan göras genom att definiera en global variabel så att den kan nås var som helst i koden om den anropas.
Här i fallet med PIR-sensor kommer vi att använda GPIO-stift som en global variabel. Avbrottsfunktionen kommer att ta ett stift som ett argument och beskriva GPIO stiftet som gör att avbrottsfunktionen uppstår.
def handle_interrupt ( stift ) :Steg 2: Ställ in GPIO-stiftet för ett avbrott: För att få värdet på GPIO-stiftet måste vi skapa ett objekt som tar input från det med hjälp av Pin.IN som det andra argumentet i vår pinklass. Vi kan byta namn på detta till vilket annat som helst.
stift = Stift ( 13 , Stift. I )Steg 3: Fäst avbrott till GPIO-stift för PIR-sensor med irq()-metoden:
Med hjälp av kommandot nedan kan vi ställa in avbrottet till en pin som vi definierade tidigare.
bron. irq ( utlösare = Stift. IRQ_RISING , hanterare = handle_interrupt )De irq() metod används för att fästa avbrottet på stiftet. irq() accepterar två olika argument:
- Utlösare
- Hanterare
trigger: Detta argument förklarar utlösarläget. Följande är tre lägen:
- Pin.IRQ_FALLING: När en stift övergår från HÖG till LÅG startas ett avbrott.
- Pin.IRQ_RISING: Vid stiftets övergång från LÅG till HÖG startas ett avbrott.
- Pin.IRQ_FALLING|Pin.IRQ_RISING: Utlösa avbrottet när en stift ändrar tillstånd. Endera stiftet går till HÖG eller LÅG.
hanterare: Denna funktion kommer att anropas när ett avbrott utlöses.
3: Gränssnitt PIR-sensor med ESP32
Eftersom vi nu har täckt begreppen avbrott med ESP32 med MicroPython kommer vi nu att koppla PIR-sensorn med ESP32. Här kommer vi att använda Pin.IRQ_RISING läge i MicroPython-kod för PIR-sensor eftersom vi vill trigga en lysdiod varje gång PIR-sensorn upptäcker någon rörelse. Denna lysdiod förblir PÅ under en viss tid och sedan släcks den.
Följande komponenter kommer att krävas:
- ESP32 utvecklingskort
- PIR-rörelsesensor (HC-SR501)
- 220 Ohm motstånd
- Bygeltrådar
- Bakbord
- LED
Schematisk för PIR-sensor med ESP32:
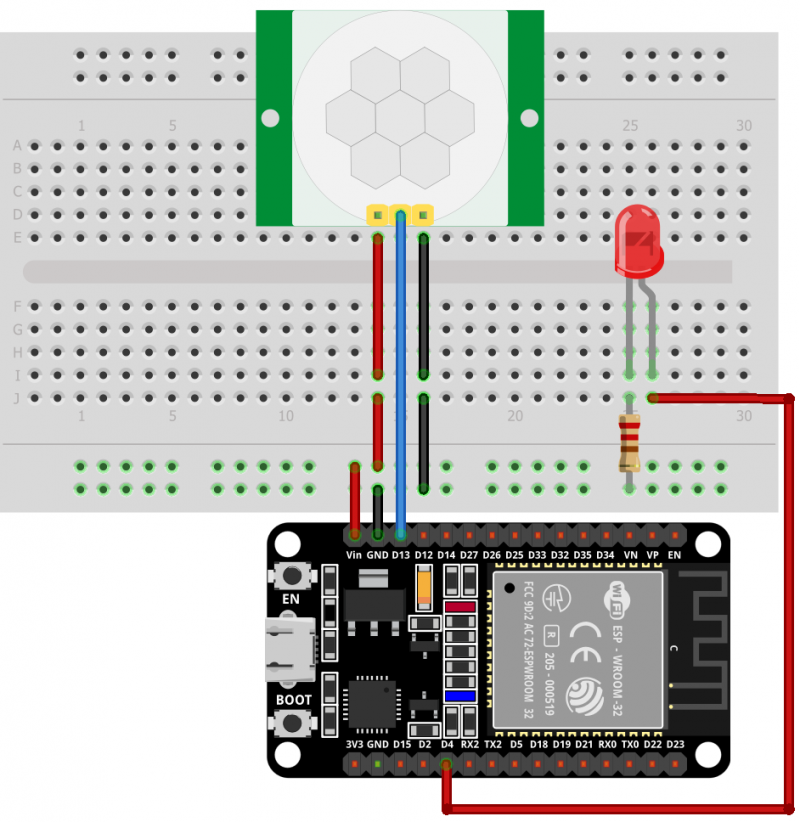
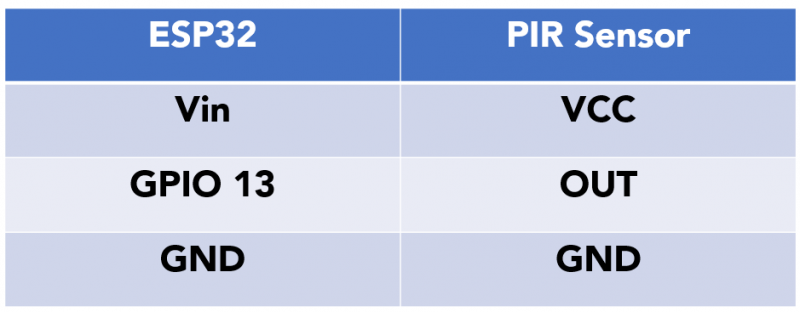
Stiftkonfigurationen för ESP32 med PIR-sensor är:
3.1: PIR-rörelsesensor (HC-SR501)
PIR är en akronym för Passiva infraröda sensorer . Två pyroelektriska sensorer som används tillsammans som detekterar mängden värme runt omgivningen. Båda dessa pyroelektriska sensorer ligger efter varandra och när ett föremål kommer inom deras räckvidd gör en förändring i värmeenergin eller signalskillnaden mellan båda dessa sensorer att PIR-sensorns utsignal blir LÅG. När PIR-utgångsstiftet blir LÅG, kan vi ställa in en specifik instruktion att utföra (LED blinkar).
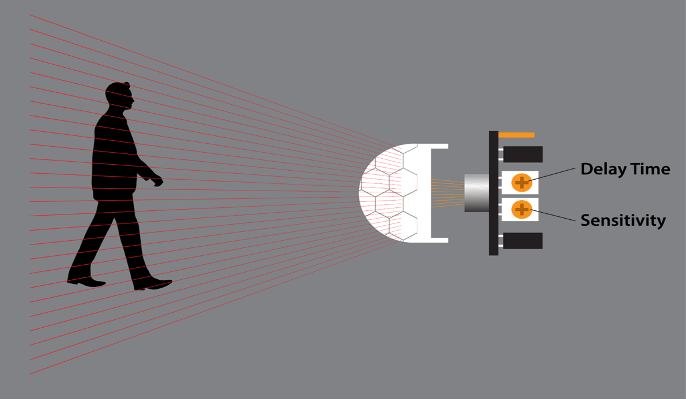
Följande är egenskaperna hos PIR-sensorn:
- Känslighet kan ställas in beroende på platsen för projektet (som att känna av mus- eller bladrörelser)
- PIR-sensorn kan ställas in för hur länge den upptäcker ett föremål
- Används i stor utsträckning i hemsäkerhetslarm och andra termiska applikationer för rörelsedetektering.
3.2: Pinout HC-SR501
PIR HC-SR501 kommer med tre stift. Två av dem är strömstift för Vcc och GND och ett är utgångsstiftet för triggersignalen.
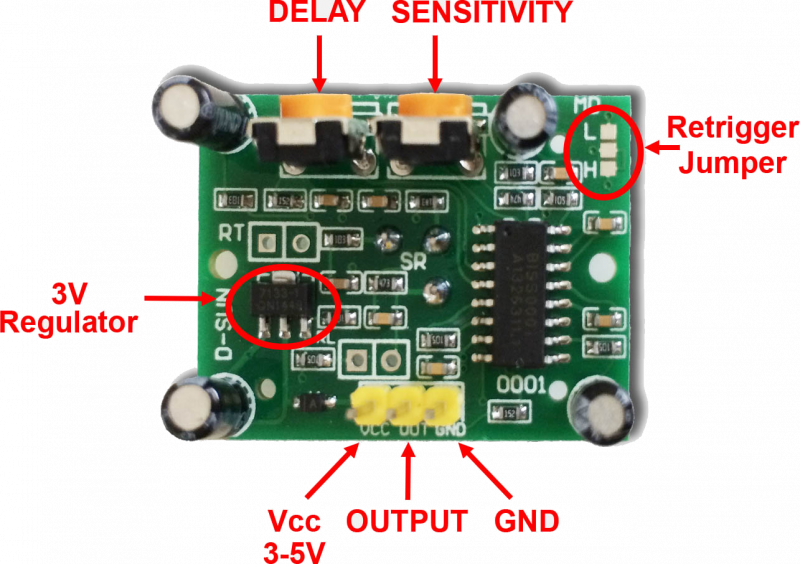
Följande är beskrivningen av PIR-sensorstift:
| Stift | namn | Beskrivning |
| 1 | Vcc | Ingångsstift för sensor Anslut till ESP32 Vin Pin |
| två | UT | Sensorutgång |
| 3 | GND | Sensor GND |
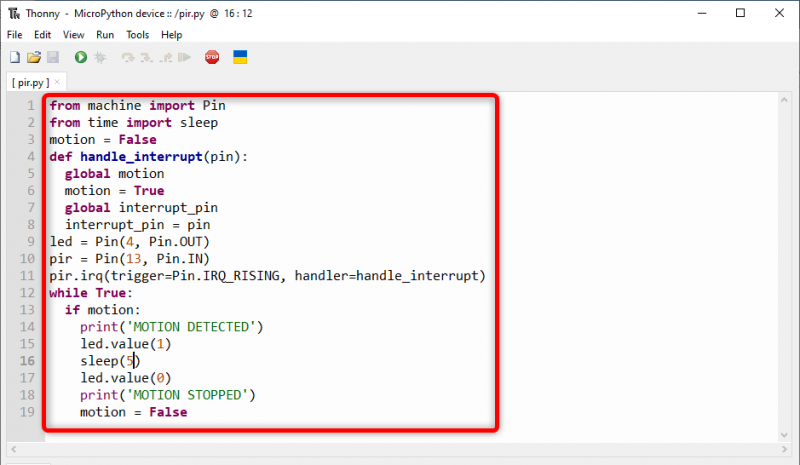
För att nu programmera ESP32, skriv den givna koden i Thonny IDE editor eller någon annan MicroPython IDE och ladda upp den till ESP32.
från maskinimport Pinfrån tid importera sömn
rörelse = Falsk
def handle_interrupt ( stift ) :
global rörelse
rörelse = Sann
global interrupt_pin
interrupt_pin = stift
led = Stift ( 4 , Stift. UT )
bron = Stift ( 13 , Stift. I )
bron. irq ( utlösare = Stift. IRQ_RISING , hanterare = handle_interrupt )
medan Sann :
om rörelse :
skriva ut ( 'RÖRELSE DETEKTERAD' )
led. värde ( 1 )
sova ( 5 )
led. värde ( 0 )
skriva ut ( 'RÖRELSE STOPPAD' )
rörelse = Falsk
Först importerade vi stift klass från maskinmodulen och sova metod för att lägga till fördröjning. Därefter skapas en variabel med namn rörelse. Denna variabel kommer att upptäcka om en rörelse detekteras eller inte.
Sedan skapade vi en funktion handle_interrupt. Varje gång PIR-sensorn upptäcker rörelse kommer denna funktion att aktiveras. Den tar ett stift som en ingångsparameter och indikerar stiftet som orsakar avbrottet.
Med enkla ord varje gång PIR upptäcker rörelse, handle_interrupt kommer att ställa in rörelsevariabeln till sant och lagra stiftet som gör att avbrottet inträffar. En sak att komma ihåg deklarerar alltid rörelse variabel som global eftersom den behövs i hela koden.
Framåt skapade vi två stiftobjekt, ett för att lagra LED-stift och det andra kommer att ta PIR-sensorutgång på GPIO-stift 13. Vidare förklarade vi att triggerstiftet i STIGANDE läge.
I den slinga en del av koden kommer den att kontrollera värdet på rörelsevariabeln när den blir sann LED kommer att tändas ansluten till stift 4 på ESP32. Om rörelsen stoppad släcks lysdioden efter 5 sek.
3.4: Utgång
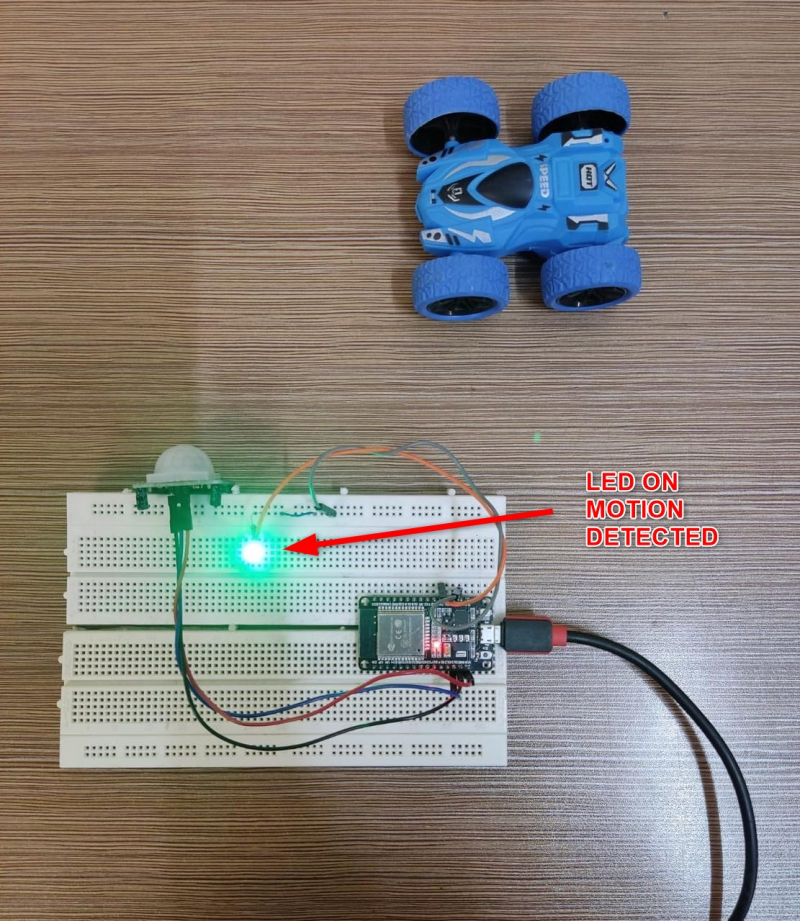
I utgångssektionen kan vi se att objektet är utanför PIR-sensorns räckvidd, så att LED är vänt AV .
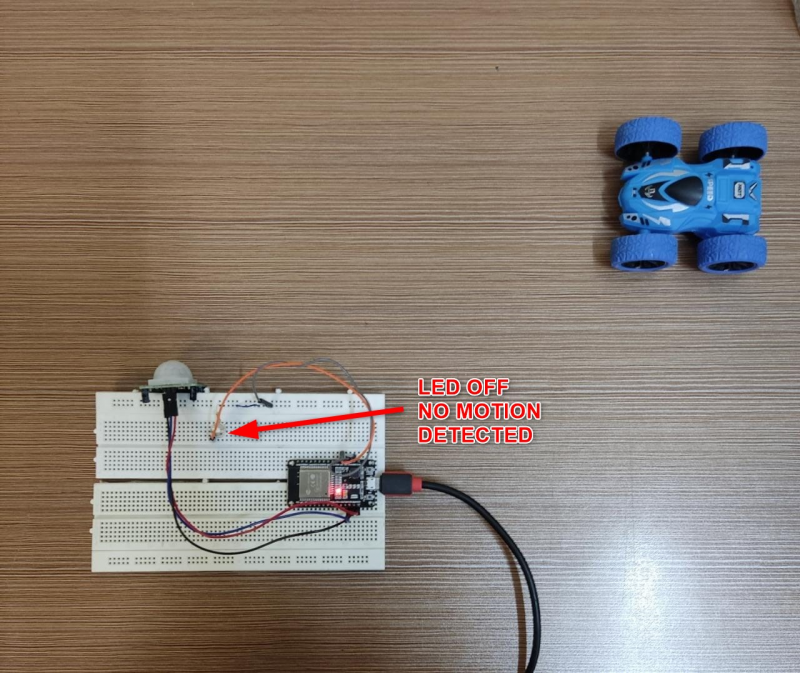
Nu kommer rörelsen som detekteras av PIR-sensorns LED att vända PÅ för 5 sek efter att om ingen rörelse upptäcks kommer den att finnas kvar AV tills nästa trigger tas emot.
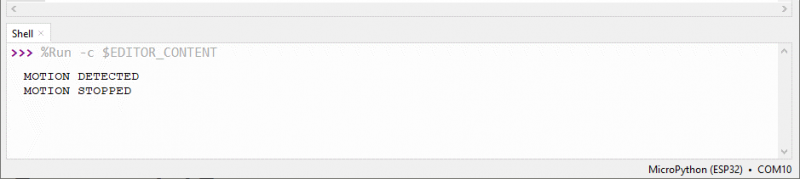
Följande utgång visas av skal/terminal i Thonny IDE.
Slutsats
En PIR-sensor med ESP32 kan hjälpa till att upptäcka rörelse hos olika saker. Genom att använda avbrottsfunktionen i MicroPython med ESP32 kan vi utlösa ett svar på någon specifik GPIO-pin. När förändring upptäcks kommer avbrottsfunktionen att triggas och en lysdiod tänds.